Planetary gear sets can be used to do some amazing things. One of which is getting high reduction rates. Let’s see how.
Video Transcript
Hi there, Cory with The Mentored Engineer here, wanting to talk to you about planetary gears. Now this will be the second video in our series on planetary gear systems, and we’re going to talk about the general calculations for planetary gear systems and how to get very high rates of reduction in our planetary gear systems. So, let’s review very quickly what a planetary gear system is and how we’re to use it. So, a planetary gear system will contain at least three gears and probably more. We have a sun gear, and we have a planetary gear that goes around the sun.
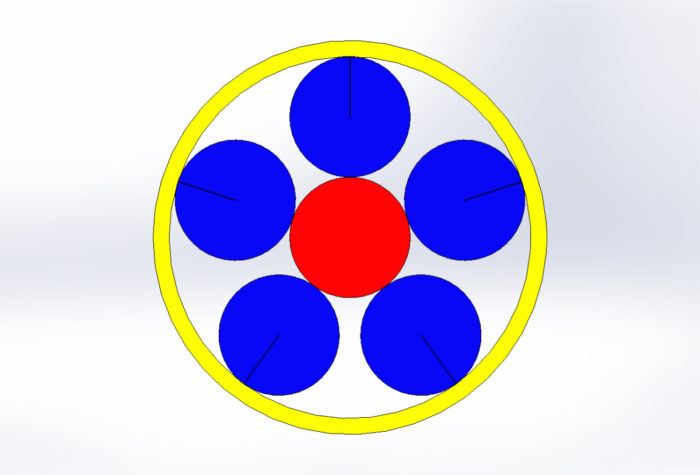
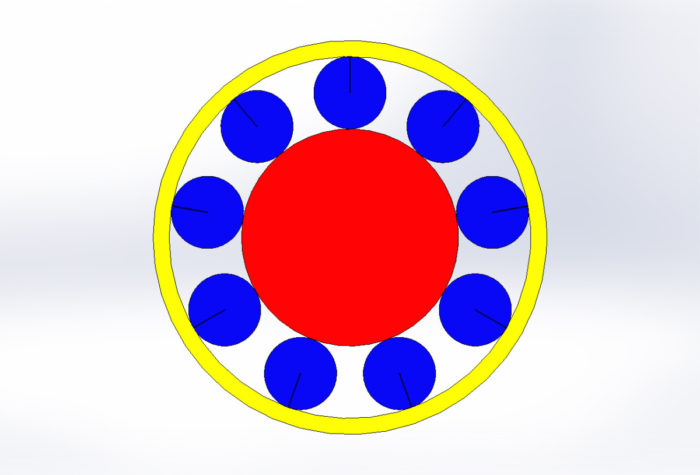
The ring gear goes around all of these and it’s an internal tooth gear that interacts with the planets. Now we can have one planetary gear, we can have two, three, or probably pretty common numbers. In the example we’re going to do right now, we’re going to have nine planetary gears going around the sun. So, let’s figure out how we do that, but before that, got to do the intro video. Hey, if you like what you see so far, please be sure to smash that like button and subscribe and click that notification bell so I can annoy you at least once a week.
So, let’s get started with the equations. The first thing we’re going to want to know is how all of our gears are related in size. So, if I have a ten tooth sun gear and eight tooth planetary gear, what size does my ring need to be? Good question. We have a very simple equation for determining that.
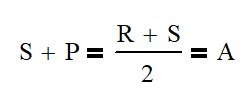
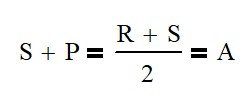
Now, before I show you this equation, I want to say that here, the equation could either represent the number of teeth that a gear has, or it could represent the pitch diameter. Because they’re in relation to each other, it really doesn’t matter. So, in this equation, we can see the size of the sun plus the size of the planet is going to equal to the size that the arm, the carriage arm, is going to turn at. All right, now that’s not a diameter. per se but it is you know
it’s the pitch circle that it’s going to travel at all right and that is also equal to the number of sun teeth plus the number of ring teeth divided by two so we get a nice equation if we know two of the three things we can figure out the rest That’s pretty cool. So, you may also be asking, how many planetary gear sets can I get into my ring and sun gear? And that all depends.
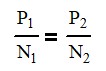
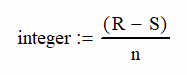
First of all, you have to have the space to put them in. But also, you need to check it with this equation. So, the number of planetary gear teeth needs to be equal to the number of ring teeth minus the number of sun teeth divided by the number of planets that you want in the system. This number has to be an integer. You can’t have a planetary gear with 4.5 teeth.
So, it’s got to have four teeth or five teeth or whatever teeth that it makes sense. All right. Now, as long as it’s an integer, you can keep going up in the number of planets. And every time you go up in the number of planets, hey, you have more meshing ability and you will actually get more available torque out of your system so that’s a cool thing so the final thing we want to know is how all the speeds of the gear system work together there’s a lot of things that are moving or not moving and we need to know exactly what ratios we can expect to get in and out so most likely we’re going to fix one item in our gear system and that could be the ring that could be the sun that could be the carriage those are your three choices really
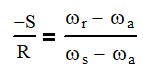
but we want to know how all those things work together and luckily there is a great equation for doing so that equation is the negative number of sun teeth divided by the number of ring teeth, and that’s going to equal the speed of the ring minus the speed of the arm. over the speed of the sun minus the speed of the arm. And this is a great simple equation that helps us out tremendously. Okay, so let’s look at some examples of how, when we hold different things, our speed changes. So, the first one we’re going to do is we’re going to hold the ring fixed and we’re going to turn the arm one revolution.
You can see here that the sun will turn 2.67 times, two and two thirds, what one revolution of the arm does. all right now if we were to reverse this and hold the ring still and then turn the sun the arm would turn three-eighths of a turn, and these are simply inverse of each other. In our last example, we’re going to hold the sun fixed, but then turn the arm one revolution, and we’re going to get 1.6 revolutions out of the ring. If we were to reverse this and put the motion into the ring, and the arm would move 0.625, five-eighths of a turn.
So, let’s talk about underdriven and overdriven. So that’s basically if we input one revolution, we would get more or less than one revolution in the output. So, in the example we just had where the sun was fixed and we inputted to the ring gear, the arm would always move less than what the ring moved. So, in this case, it was one revolution on the ring and five eighths of a revolution on the arm carriage. If we reverse this and input on the arm carriage and output on the ring, we are overdriven now
and we have a 1.6 ratio between the two. So, let’s see how the speed ratios change as we look at a sun gear of 27 teeth, a planetary gear of nine teeth. And if we work the equations out, we find that we have to have 45 teeth on our ring gear. If you think about this, there’s only so big that a sun gear can be compared to a planet compared to a ring that we really can’t get high reduction rates. You know, you’re generally looking, you know, from a quarter of a revolution output compared to one revolution input.
So, four to one ratio dropping down. That’s probably the practical maximum that we can actually get out of a planetary gearbox in one stage. So, if we add multiple sets of planetary gears to our apparatus, we can actually get ridiculously high ratios. So, I’m actually going to show you part of this video where this guy 3D printed a 160 to 1 gear ratio wench and used it to lift an anvil and a couple of tires, and it did it just fine. Hey guys, welcome to Gear Down for What?
Today, I have a special treat for you guys. Introduce yourself to the world’s largest, heaviest, toughest, 160 to 1 3D printed compound planetary gear set. That’s a mouthful. What does it all mean? Let me show you.
First off, let’s talk about a mechanical advantage. A gear ratio is a mechanical advantage, very similar to how a lever works. Often a lever is used to apply a large force on an object over a very short distance. Okay, so in that, if you look on the first stage where the input is, the sun is turning, and the ring is held fixed, and the sun has 27 gears, and the planets all have nine teeth on each of those gears. And that means that the ring gear has to have 45 teeth from the equation that I used earlier.
So, what it doesn’t really talk about is that is only a one to… 0.38 ratio. It’s not 160 to 1. What he’s not showing you is that there’s actually gears on all those planets that are turning the internal winch. Now the teeth there are a lot smaller, so I couldn’t actually count the number of teeth that there were on there. and I definitely couldn’t see how many teeth were on the ring gear, which is where the load is actually attached.
So, this is a two-stage planetary gearbox. So, you have a rotating sun, a fixed ring, and then you have the carriage and the planetary gears going around it. That gives us our 1 to 0.38 ratio. of input to output but obviously not 160 to 1. as we look at this first we want to see how many planets can we get in there so if we take our equation the number of teeth in the ring number of teeth in the sun and then divide that by however many planets we want we come up with 18 divided by number of planets and you can see here to get an integer on the output we can have two sets we can have three sets we can have six sets and nine sets and 18 sets, of course.
18, I just don’t see how you get them in there, so we can do nine. In the second set of this planetary gearbox, the rotation of the planet plus its motion in the carriage is actually driving the next set of rings. And we’ll notice that those two motions are in opposite direction. okay so the motion of the planets we normally don’t care about but in this case we do
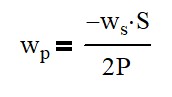
and I actually had to look and actually develop my own equation here for the motion of the planet itself so the motion of the planet is equal to the negative motion of the sun gear times the number of teeth in the sun gear divided by twice the number of teeth in the planet So if we input 160 RPMs on the sun, this will actually give us a ratio of negative 240 RPMs on the planet. So, the reason we want to put 160 RPMs in is so that we know we’re successful when we get one RPM out.
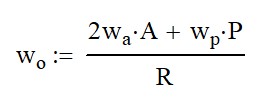
So now we’re going to use another equation to figure out what the motion on the output ring gear is when our carriage and our planets are providing the input. All right, so we’ve got negative 240 RPM of the planets moving and we have 60 RPM of the carriage moving. They’re moving in opposite directions. So, our output speed is going to be equal to two times the speed of our carriage times its pitch diameter, A, plus the speed of rotation of the planetary gears times the number of gears in the planetary. And all this is divided by the number of teeth in the ring gear.
OK, so now before I proceed, I want to mention that we are looking at pitch diameters here and not necessarily the actual number of teeth, because the input teeth on the planetary gear are very big, and the output ones are very small. So, they’re different styles of teeth. They’re different diametric pitches. So just to keep the math simple, we’re going to use 8.81 teeth on the planetary gear and we’re going to have 44.81 teeth on the ring gear. Now, obviously, you can’t have 0.81 of a teeth and actually expect it to work.
You’re going to have to go with a much smaller pitch diameter. So, if we were using, you know, 16 or 12 pitch diameter for the large teeth, we might have to go to 20 or 24, maybe even smaller, 30, 32 for the output one. So just keep that in mind while it’s not going to make sense. So, if we go with 8.81 teeth on the planetary gear, we’re going to have 44.81 teeth on the ring gear. And you notice that the first ring gear was 45 teeth, and this one is 3 16ths of a tooth less.
What’s going to happen is it’s going to take a lot to get that to move. And this is exactly how we get the ratio of 160 to 1. Just look at this animation here of it rotating 40 times on the sun gear to go quarter turn on the output. So that’s exactly how you get large gear reduction ratios when using planetary gears. So, one bit of advice for our friends doing the 3D printed winch here.
If you’re having problems where the output teeth are slipping on the planetary gears, go ahead and put a sun gear in there so that you don’t have those planetary gears being bent where you got two supports on the outside and then you’ve got the winch pushing down on the inside. If you put a sun gear in there, you now have a balanced shaft because the gears will try to be pushed away, and they’ll be trying to compress that sun. So, a bit of advice for you and stay tuned next time. We are going to talk about doing multiple speed transmissions.
Hey, thank you for watching. Be sure to hit that like button down there if you want to keep good content like this showing up in your inbox. Hey, thank you for watching the Mentored Engineer and have a great day.